Building a DeepSpeed Docker image for Kubernetes cluster Dockerhub zihaokevinzhou/deepspeed:torch113_cuda117_ds076 2022-11-22 Python #Data Science
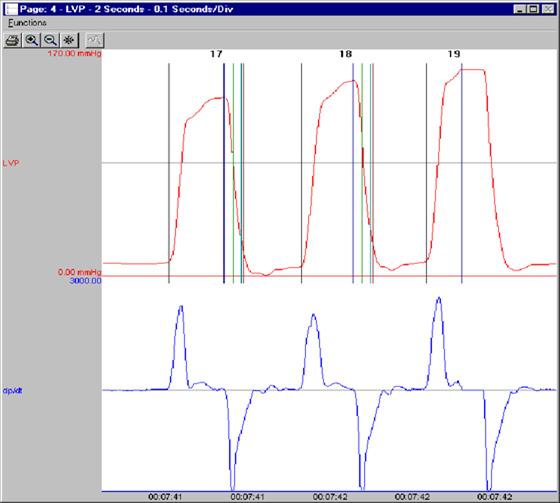
ABioMed Preprocessing Continued Analysis of Left Ventricular Pressure 2022-10-29 Python #Data Science
ABioMed Preprocessing Code Review Identifying bugs in ABioMed Preprocessing Code 2022-10-23 Python #Data Science
Python Data Science CookieCutter The Python Data Science CookieCutter is a useful standardized framework for organizing data science projects. Here I write down things I learn after going through the framework. 2021-10-20 Python #Data Science
PX4 EKF Code Review A mathematical review of PX4's implementation of the Extended Kalman Filter(EKF) algorithm. 2020-10-08 Algorithm #Estimation theory #Optimal control